Here you will find some research I have been involved in. I am interested in control theory, robotics, and intelligent mechanical systems, with a focus on uncertainty-aware modeling, safety-critical design, and data-driven methods for dynamical systems. RL and Diffusion models in controls are of interest!
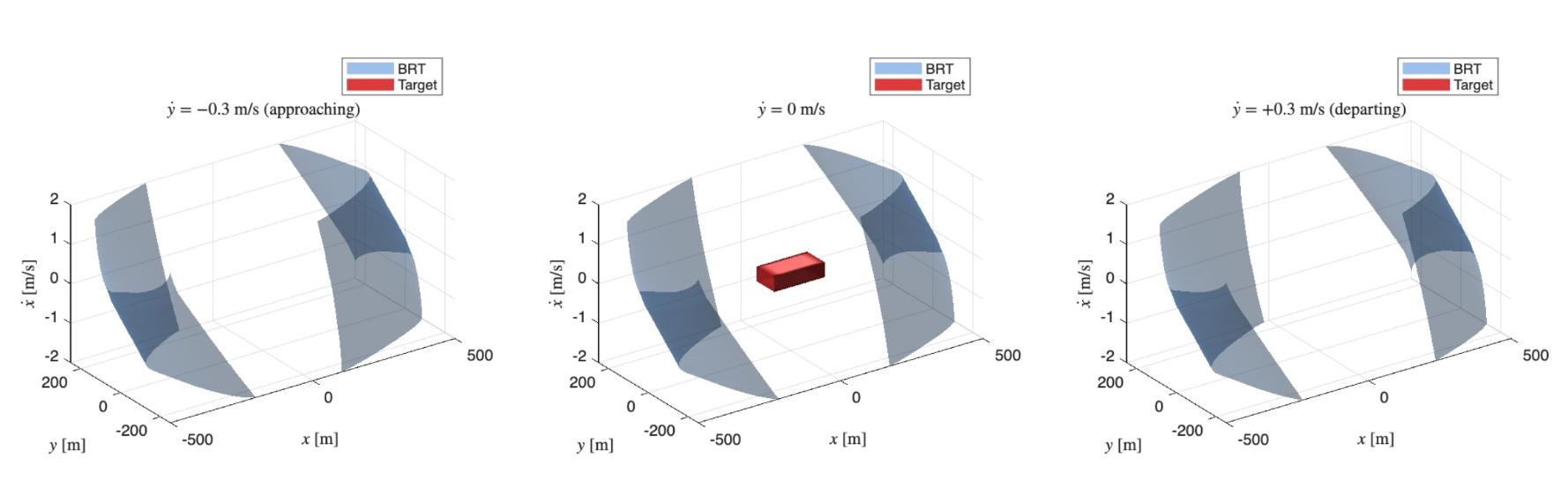
Hamilton-Jacobi Reachability for Spacecraft Collision Avoidance
Accepted to the 20th IEEE International Conference on Control & Automation (ICCA 2026), Almaty, Kazakhstan. We pose two-satellite same-orbit collision avoidance as a zero-sum differential game on planar Hill-Clohessy-Wiltshire dynamics in the RTN frame, compute backward reachable sets via the HJI PDE, and integrate them with a hybrid supervisory automaton governing nominal, evasive, and recovery modes.

