Overview
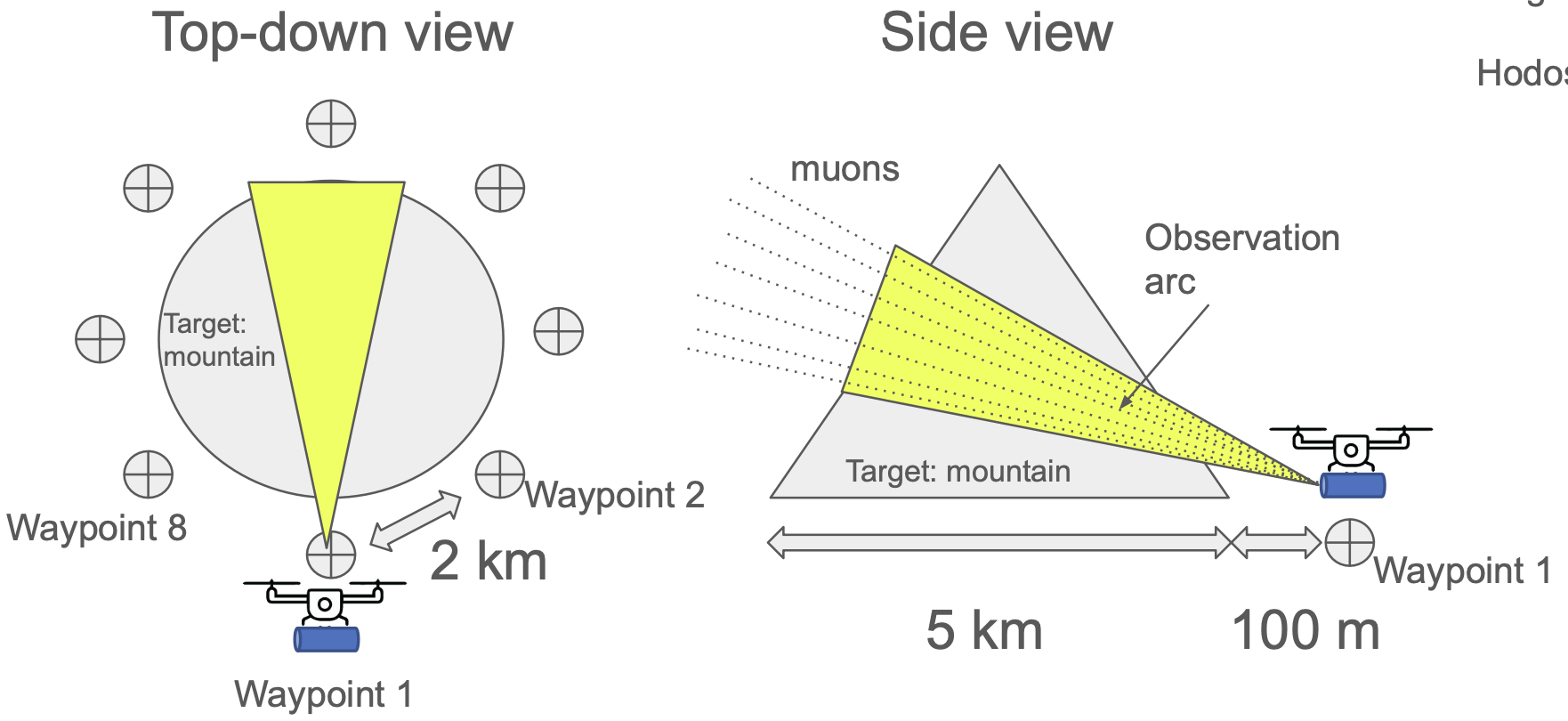
During my internship at Outer Rim Exploration Inc. (ORE), I worked as a Hardware Engineering Intern on the design and development of a drone-based hodoscope system—the startup’s minimum viable product (MVP). The goal: detect muons to investigate ore deposit locations around mountains, utilizing drones and muon tomography.
What I Built
- Designed the full mechanical assembly in SOLIDWORKS
- Utilized solenoid mechanisms to set zenith angle of observations
- Designed custom gearbox to rotate an 8 kg payload
- Implemented telescopic slides so payload can reach optimal length for muon data collection
Impact
| Result | Details |
|---|---|
| $200K Seed Funding | Secured startup funding by validating technology idea to investors |
| 40% Cost Reduction | Shifted design to COTS (commercial off-the-shelf) parts |
| First Pilot Study | Secured first pilot study contract for the prototype |
System Architecture
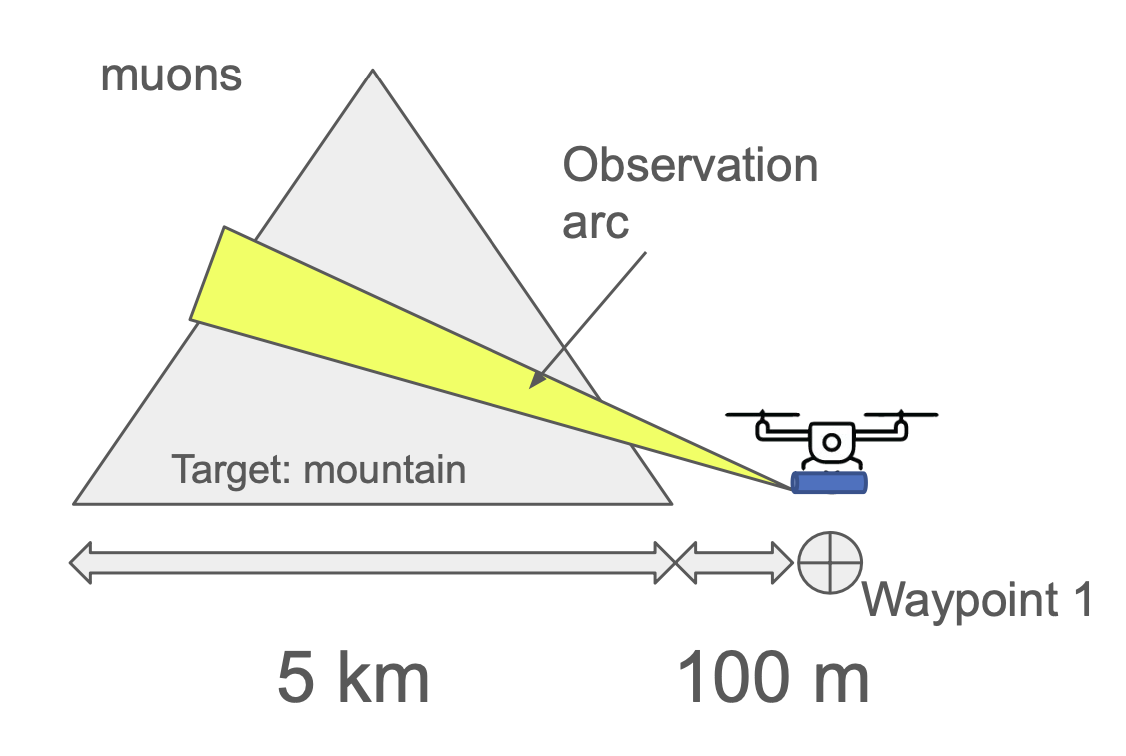
Survey Flow (MVP)
- Fly to next waypoint
- Land
- Drone enters sleep mode
- Drone recharges battery with solar panels
- Hodoscope enters observe mode using drone battery
- Observe for 1 day
- Repeat until survey finished
Prototype Specifications
| Parameter | Value |
|---|---|
| Maximum layer distance | ~76.0 cm |
| View angle | 15° |
| Angular resolution | 7.5° |
| Spatial resolution @ 1km | 131 m |
| Spatial resolution @ 100m | 13 m |
| Spatial resolution @ 10m | 1 m |
| Spatial resolution @ 1m | 14 cm |
| Output | Muon flux image (2×2) |
Hodoscope prototype: contracted and extended views
Engineering Requirements
Drone Constraints
| Requirement | Target |
|---|---|
| Price | < $2,000 |
| Power | Solar-powered |
| Payload capacity | Based on Aurelia X6 (5 kg) |
| Flight time | ~30 min |
| Range | ~5 km |
Hodoscope Constraints
| Requirement | Target |
|---|---|
| Price | < $1,000 |
| PCB size | < 5 cm per module |
| Operation | Fully autonomous |
| Observation duration | < 1 day per waypoint |
My Contributions
Mechanical + Plastic CAD Design
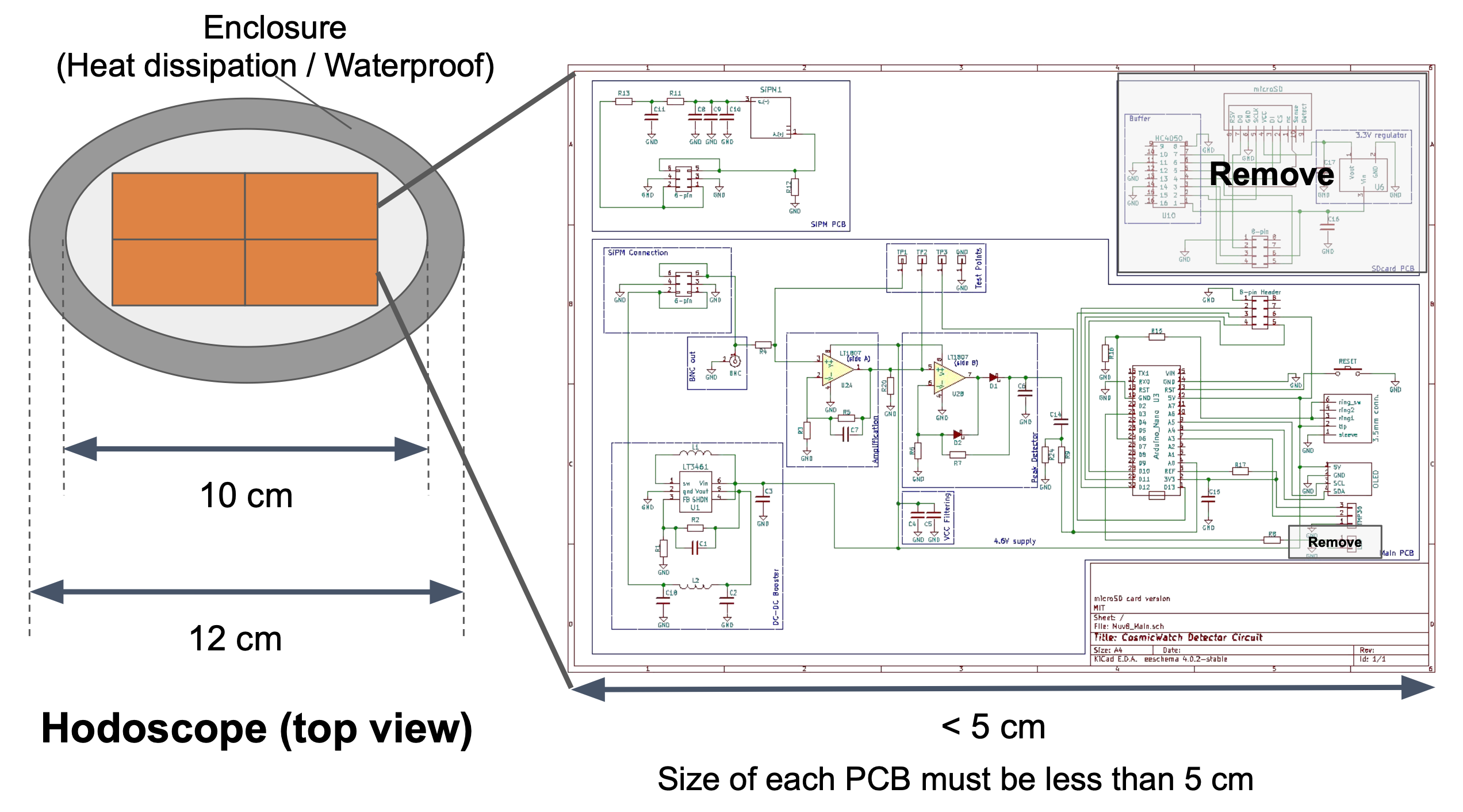
Designed the full plastic CAD assembly for the drone-mounted muon detector in SOLIDWORKS:
- Integrated PCB layouts, support structures, and validation systems into a unified mechanical package
- Ensured manufacturability, structural integrity, and tight spatial constraints for drone-compatible payloads
- Designed enclosure with heat dissipation and waterproofing considerations
Structural Topology Optimization & FEA
Weight Optimization of Telescopic Hodoscope Casing
Topology optimization is a technique that removes material from a user-defined shape or design domain to maximize performance. Performance can mean:
- Maximize stiffness-to-weight ratio
- Minimize displacement
- Combination of the two for a given set of loading conditions
Pre-processing and Digitalization
The digitalization process was carried out using 3D modelling capabilities in SOLIDWORKS. Although the housing, PCB, scintillators, and muon detector are modelled as separate parts, they were combined as a single monolithic body made of 6061 Aluminum Alloy T4. This approach:
- Provides worst-case scenario (plastic scintillators are lighter than 6061)
- Enables topology optimization (SOLIDWORKS doesn’t allow simultaneous optimization of assemblies)
- Simplifies the model by removing auxiliary elements (linear slides replaced with aluminum bar in extended position)
External Loads and Fixtures
Fixtures describe how the model is supported and define the boundary conditions for FEM:
- 2 areas of fixed geometry
- 2 areas of fixed hinges (where the motor from the worm gearbox connects)
Goals and Constraints
The topology study finds the stiffest structure possible given a certain amount of material removal. The optimization algorithm minimizes global compliance (a measure of overall flexibility, defined as the sum of strain energies of all elements).
| Parameter | Value |
|---|---|
| Target mass reduction | 60% |
| Original mass | 15 kg |
| Optimized mass | 9 kg |
Manufacturing Controls
To ensure manufacturability, we applied:
- Preserved regions to maintain critical geometry
- Symmetry control to speed up convergence
- Prevention of undercuts and hollow parts
Optimization Results
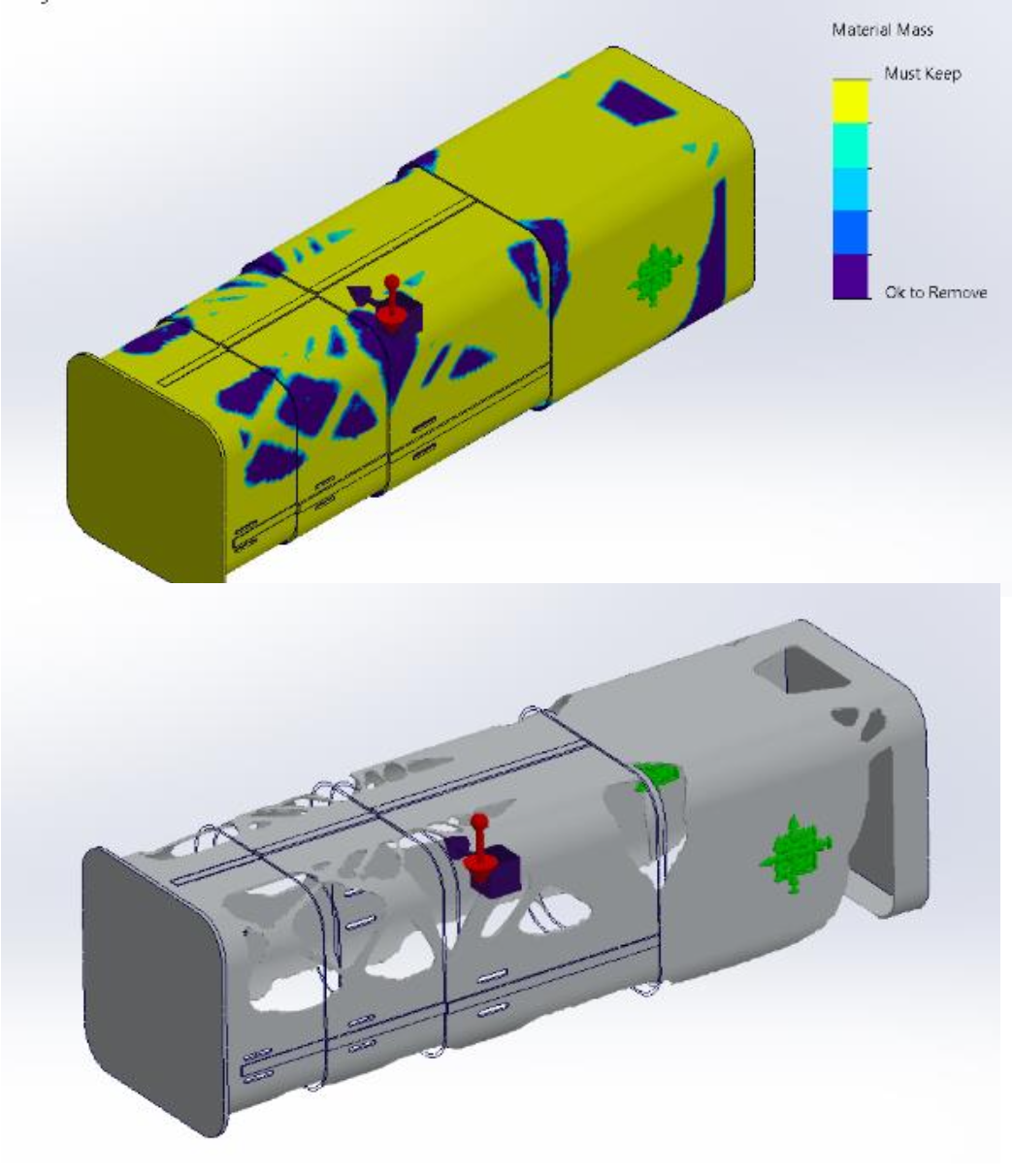
After running the optimization:
- Achieved 40% mass reduction with truss-like structure
- Same pattern can be used for each layer
- Added bottom constraint to create truss structure below
- Post-processing: export as STL, retrace cuts for smoother, more machinable geometry
Deflection Modeling (ABAQUS Verification)
The deflection due to self-weight was studied to ensure high factor of safety and stability as zenith angle changes during observation. We needed to avoid fatigue as the cause of failure.
Material & Setup
| Property | Value |
|---|---|
| Material | 6061 Aluminum Alloy T4 |
| UTS | 180 MPa |
| Yield Strength | 110 MPa |
| Mesh Type | Curvature-based (for accuracy) |
Fixtures:
- Hinge fixture at turning shaft (connected to worm gearbox at both ends)
- Fixed fixtures for screws around drone mount
- Gravitational force applied at mid-plane
FEA Results

Von Mises Stress

Strain Analysis

Displacement (URES)

Safety Factor
Key Findings:
- Stress is very low → expect little fatigue or creep
- Displacement highest at end of hodoscope (as expected) — consider when designing ratchet system for motor/zenith angle control
- Factor of Safety: 3.5 — above 1, provides reasonable margin
Custom MATLAB FEM Solver
Used a custom MATLAB-based solver to perform independent verification:
- Buckling analysis
- Static deflection and load-path evaluations
- Arbitrary-condition FEA verification
The solver implements CPE4/CPS4 elements for plane strain/stress analysis with 4-point Gaussian quadrature integration.
View MATLAB FEM Code
% Finite element code for a rectangle subject to any combination of applied
% force and displacement boundary conditions (CPE4, CPS4 Elements)
clear, close, clc;
dx = 30; % x dimension
dy = 5; % y dimension
mx = 24; % # elements in x direction - should always be an even number
my = 4; % # elements in y direction - should always be an even number
mel = mx*my; % total number of elements
mno = (mx+1)*(my+1);
ey = 0.1;
nu = 0.3;
la = nu*ey/((1+nu)*(1-2*nu));
mu = ey/(2*(1+nu));
D = zeros(3,3);
% plane strain
D(1,1) = la + 2*mu;
D(1,2) = la;
D(1,3) = 0;
D(2,2) = la + 2*mu;
D(2,3) = 0;
D(3,3) = mu;
D(2,1) = D(1,2);
D(3,1) = D(1,3);
D(3,2) = D(2,3);
zv = 1/sqrt(3);
z = zeros(4,2);
z(1,1:2) = [-zv,-zv];
z(2,1:2) = [zv,-zv];
z(3,1:2) = [zv,zv];
z(4,1:2) = [-zv,zv];
x = zeros(mno,2); % global nodal coordinates
for j = 1:mx+1 % nodes in x direction
for i = 1:my+1
gn = j + (i-1)*(mx+1); % global node #
x(gn,1) = (j-1)*dx/mx;
x(gn,2) = dy-(i-1)*dy/my;
end
end
nc = zeros(mel,4); % element connectivity
for i = 1:my
for j = 1:mx
ge = j + (i-1)*mx;
nc(ge,1) = j + i*(mx+1);
nc(ge,2) = nc(ge,1)+1;
nc(ge,4) = j + (i-1)*(mx+1);
nc(ge,3) = nc(ge,4) + 1;
end
end
n = zeros(4,4);
% n(q,a) is shape function Na(s1,s2) evaluated at integration point q
for q = 1:4
n(q,1) = .25*(1-z(q,1))*(1-z(q,2));
n(q,2) = .25*(1+z(q,1))*(1-z(q,2));
n(q,3) = .25*(1+z(q,1))*(1+z(q,2));
n(q,4) = .25*(1-z(q,1))*(1+z(q,2));
end
ns = zeros(4,4,2);
% derivative of shape function Na(s1,s2) w.r.t. sj evaluated at integration point q
for q = 1:4
ns(q,1,1) = -.25*(1-z(q,2));
ns(q,1,2) = -.25*(1-z(q,1));
ns(q,2,1) = .25*(1-z(q,2));
ns(q,2,2) = -.25*(1+z(q,1));
ns(q,3,1) = .25*(1+z(q,2));
ns(q,3,2) = .25*(1+z(q,1));
ns(q,4,1) = -.25*(1+z(q,2));
ns(q,4,2) = .25*(1-z(q,1));
end
J = zeros(2,2,mel,4);
invJ = zeros(2,2);
detJ = zeros(mel,4);
nx = zeros(mel,4,4,2);
B = zeros(3,8,mel,4);
for p = 1:mel % all elements
for q = 1:4 % integration points per element
for i = 1:2
for j = 1:2
for a = 1:4
J(i,j,p,q) = J(i,j,p,q) + ns(q,a,j)*x(nc(p,a),i);
end
end
end
detJ(p,q) = det(J(:,:,p,q));
invJ = inv(J(:,:,p,q));
for a = 1:4
for j = 1:2
for i = 1:2
nx(p,q,a,j) = nx(p,q,a,j) + ns(q,a,i)*invJ(i,j);
end
end
B(1,(a-1)*2+1,p,q) = nx(p,q,a,1);
B(1,(a-1)*2+2,p,q) = 0;
B(2,(a-1)*2+1,p,q) = 0;
B(2,(a-1)*2+2,p,q) = nx(p,q,a,2);
B(3,(a-1)*2+1,p,q) = nx(p,q,a,2);
B(3,(a-1)*2+2,p,q) = nx(p,q,a,1);
end
end
end
ke = zeros(8,8,mel); % local stiffness matrix
for p = 1:mel
for q = 1:4
ke(:,:,p) = ke(:,:,p) + B(:,:,p,q)'*D*B(:,:,p,q)*detJ(p,q);
end
end
kg = zeros(mno*2,mno*2); % global stiffness matrix assembly
for p = 1:mel
for a = 1:4
for b = 1:4
gna = nc(p,a);
gnb = nc(p,b);
for i = 1:2
for j = 1:2
kg(2*(gna-1)+i,2*(gnb-1)+j) = kg(2*(gna-1)+i,2*(gnb-1)+j) + ke(2*(a-1)+i,2*(b-1)+j,p);
end
end
end
end
end
f = zeros(mno*2,1);
% Define force boundary conditions for uniaxial tension
F = 1E-2;
f(2*(mx+1)-1,1) = F/2;
for i = 2:my
f(i*2*(mx+1)-1,1) = F;
end
f((my+1)*2*(mx+1)-1,1) = F/2;
% Define zero displacement DOFs
k = 0;
for i = 1:my+1
gn = (i-1)*(mx+1)+1;
zudofs(i+k) = 2*gn-1;
if i == my/2+1
zudofs(i+1) = 2*gn;
k = 1;
end
end
% Manipulate stiffness matrix for boundary conditions
for i = 1:2*mno
if any(zudofs == i) == 1
f(i) = 0;
for j = 1:2*mno
if j == i
kg(i,j) = 1;
else
kg(i,j) = 0;
end
end
else
for k = 1:size(zudofs,2)
j = zudofs(k);
kg(i,j) = 0;
end
end
end
u = kg\f;
% Stress/strain interpolation
clear X Y strainX0 stressX0
np = 1;
[X,Y] = meshgrid([0:dx/mx/np:dx],[0:dy/my/np:dy]);
for k = 1:size(X,1)
for l = 1:size(X,2)
x0 = [X(k,l) Y(k,l)];
j = ceil(x0(1)/(dx/mx));
if j == 0; j = 1; end
i = ceil((dy-x0(2))/(dy/my));
if i == 0; i = 1; end
p = j + (i-1)*mx;
midx = 1/2*(x(nc(p,1),1)+x(nc(p,3),1));
midy = 1/2*(x(nc(p,1),2)+x(nc(p,3),2));
w = [x(nc(p,3),1)-midx, x(nc(p,3),2)-midy];
s = [(x0(1)-midx)/w(1),(x0(2)-midy)/w(2)];
N(1) = .25*(1-s(1))*(1-s(2));
N(2) = .25*(1+s(1))*(1-s(2));
N(3) = .25*(1+s(1))*(1+s(2));
N(4) = .25*(1-s(1))*(1+s(2));
strain = zeros(3,4);
for i = 1:3
for q = 1:4
strain(i,q) = (B(i,[1,3,5,7],p,q)*u(2*nc(p,:)-1) + B(i,[2,4,6,8],p,q)*u(2*nc(p,:)));
end
end
stress = D*strain;
strainNodal = (n\strain');
stressNodal = (n\stress');
strainX0(k,l,:) = N*strainNodal;
stressX0(k,l,:) = N*stressNodal;
end
end
% Visualization
figure(1)
surf(X,Y,strainX0(:,:,1))
xlabel('x'); ylabel('y'); title('\epsilon_{11}')
view(2); colorbar
figure(2)
surf(X,Y,stressX0(:,:,1))
xlabel('x'); ylabel('y'); title('\sigma_{11}')
view(2); colorbar
u1 = zeros(my+1,mx+1);
u2 = zeros(my+1,mx+1);
for j = 1:my+1
for i = 1:mx+1
gn = (j-1)*(mx+1)+i;
u1(j,i) = u(2*gn-1);
u2(j,i) = -u(2*gn);
end
end
figure(3)
surf(X,Y,u1(:,:))
xlabel('x'); ylabel('y'); title('u_{1}')
view(2); colorbar
figure(4)
surf(X,Y,u2(:,:))
xlabel('x'); ylabel('y'); title('u_{2}')
view(2); colorbar
Precision Rotation Stage Design
Designed a high-accuracy rotation stage to control the detector’s zenith angle:
- Created a solenoid-pin locking mechanism enabling:
- 1°-level angular accuracy
- Bidirectional motion
- Reduced vertical clearance between drone and payload
- Designed custom gearbox to rotate an 8 kg payload




Deployment Mechanism Research
Investigated alternatives to linear slide deployments:
| Mechanism Type | Evaluation Criteria |
|---|---|
| Pantographic mechanisms | Compactness, alignment precision |
| Elastically deformable systems | Environmental robustness |
| Inflatable structures | Mechanical complexity |
| Telescopic slides | Selected — optimal length for muon data collection |
Compared mechanisms based on: compactness, alignment precision, environmental robustness, and mechanical complexity.
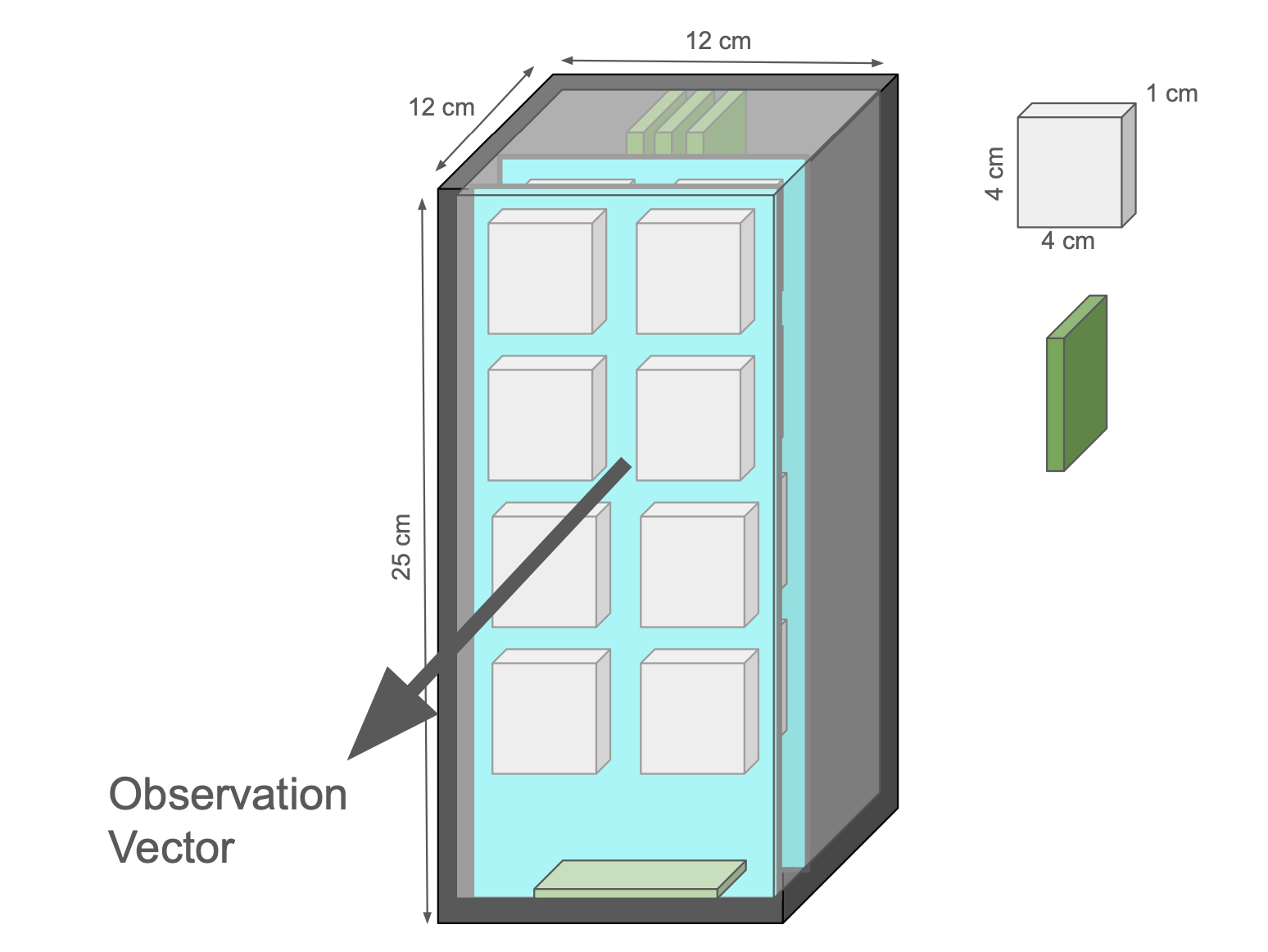
PCB Integration
The CosmicWatch PCBs presented a size challenge—the main PCB (6.6 × 6.3 cm) was too large for the compact enclosure design.
Solution: Orient larger main PCBs vertically and connect with cables to smaller SiPM/scintillator boards (4 × 4 cm) arranged horizontally as 2×2 arrays for each detection layer.
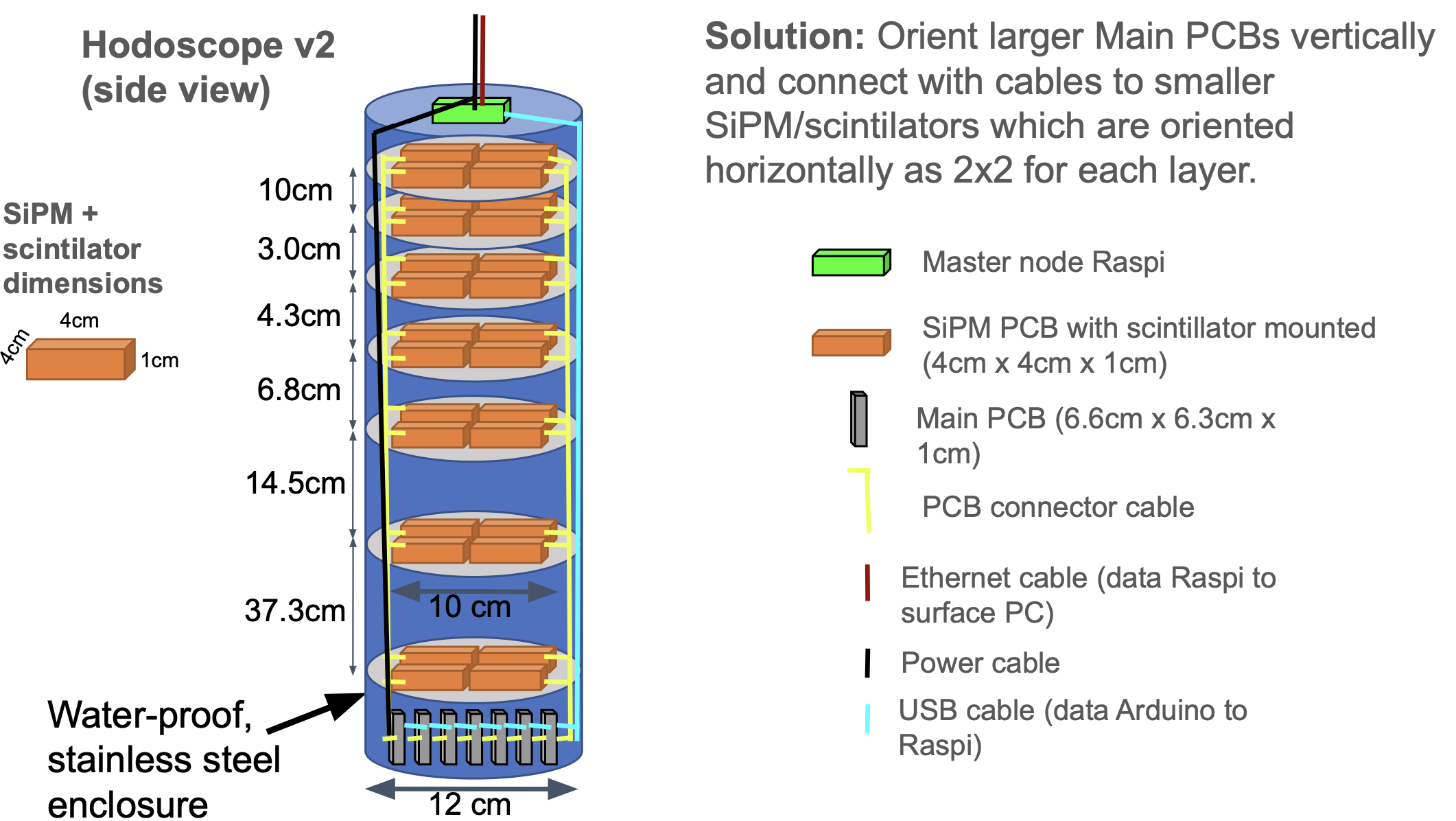
System Components:
- Master node (Raspberry Pi)
- SiPM PCB with scintillator mounted (4 × 4 × 1 cm)
- Main PCB (6.6 × 6.3 × 1 cm)
- PCB connector cables
- Ethernet cable (data: Raspi → surface PC)
- Power cable
- USB cable (data: Arduino → Raspi)
Failure Analysis
- Developed code for analyzing potential failure modes in the system
- Created tools to simulate and identify weak points in the design
- Documented failure scenarios and mitigation strategies
Technical Background
How It Works
A hodoscope consists of arrays of scintillator detectors that register the passage of charged particles. When a cosmic ray or muon passes through the detector, it produces light signals captured by silicon photomultipliers (SiPMs). By analyzing the timing and position of these signals across multiple detector layers, the trajectory of the particle can be reconstructed—enabling subsurface density imaging.
Applications
- Geological surveys and mineral exploration
- Subsurface void detection
- Archaeological site mapping
- Infrastructure inspection
Here is an actual built out hardware version!

Skills Developed
- CAD & Mechanical Design: SOLIDWORKS for full assembly design and plastic enclosures
- FEA & Optimization: MATLAB-based topology optimization, buckling and static analysis
- Mechanism Design: Precision rotation stages, gearbox design, solenoid locking systems
- GD&T: Geometric dimensioning and tolerancing for manufacturing
- Design for Manufacturing: Optimizing designs for drone payload constraints, COTS integration
- PCB Integration: Mechanical-electrical interface design for compact payloads
- Research & Trade Studies: Deployment mechanism comparison and selection
- Cross-functional Collaboration: Working with electrical and software teams
- Technical Documentation: Creating assembly guides and specifications
Hardware Engineering Internship at Outer Rim Exploration Inc., 2024